
Indian Institute of Technology Madras
Students graduating with a dual degree in Robotics shall be capable of understanding and analyzing the following:
Basic robotic technologies used across various applications
Kinematics, dynamics, and control of Industrial and field/service robots
Sensing, perception, planning, and control applied to autonomous robots
Application of Artificial Intelligence, Neural Networks and Reinforcement learning in Robotics
Hardware systems and controllers used in robotics
Design of robotic systems for new applications
Program Offers
The ID-DD programme is offered by faculty from the departments of Aerospace Engineering, Applied Mechanics, Civil Engineering, Computer Science and Engineering, Electrical Engineering, Engineering Design, Mechanical Engineering and Ocean Engineering. The true interdisciplinary nature of Robotics is reflected in the joint programme collectively offered by faculty from various Depts.
Enrollment
A B. Tech student or a Dual Degree student of IIT Madras in any discipline (except biosciences) is eligible to upgrade/opt for this programme provided the student has a CGPA of 8.0 or above up to 5th semester. Total number of seats will be fixed at 25 and allocation of dual degree specialization and award of the degree will be governed by the rules of the Institute.
Curriculum
ID-DD-Robotics has a very flexible curriculum. The programme spans a period of five semesters of the five-year dual degree programme. There will be a bridge course covering the basics of electrical, mechanical, and computer science fundamentals applicable to robotics. This course will ensure that the students who enters into this specialisation from different streams have the basic understanding of robotics. The curriculum also allows short term (1-3 months)/ long term (up to 6 months) internships with potential companies / research organizations.
In tune with the overall structure of the dual degree program being offered in the Institute, the number of courses to be offered and the credit distribution are as follows:
Total Credits required
150 to 160
No. of PMT CORE courses to be offered
3 (33 credits)
No. of electives to be offered
4 ( 36±2 credits)
No. of labs. to be offered
1 ( 6 credits)
Project work/internship
1 (85 credits)
Interdisciplinary DD in Robotics -course curriculum
Sl.No | Course No | Course Name | L | T | E | P | O | C |
| Semester 6 |
|
|
|
|
|
|
|
1 | ID6040 | Core 1: Introduction to Robotics | 4 | 0 | 0 | 0 | 8 | 12 |
|
| Total credits |
|
|
|
|
| 12 |
| Semester 7 |
|
|
|
|
|
|
|
1 | ED6007 | Core 2: Mechanics and Control of Serial Manipulators | 4 | 0 | 0 | 0 | 8 | 12 |
|
| Electives |
|
|
|
|
|
|
|
| Total Credits : |
|
|
|
|
| 12 |
| Semester 8 |
|
|
|
|
|
|
|
1 | ID5690 | Internship/Summer Project (Project I) |
|
|
|
|
| 20 |
|
| Electives |
|
|
|
|
|
|
| Semester 9 |
|
|
|
|
|
|
|
1 | ED5315 | Core 3: Field and Service Robotics | 3 | 0 | 0 | 0 | 6 | 9 |
2 | ID6100 | Core Lab1: Robotics Laboratory | 0 | 0 | 0 | 3 | 3 | 6 |
| ID5691 | Project II |
|
|
|
|
| 25 |
|
| Total Credits : |
|
|
|
|
| 15 |
| Semester 10 |
|
|
|
|
|
|
|
1 | ID 5692 | Project III |
|
|
|
|
| 40 |
|
| Total Credits : |
|
|
|
|
|
|
Project
85 credits to be completed in 8th, 9th and 10th semester
Electives
36±2 credits to be completed from the approved list in 7th, 8th, and 9th semester
Total credits for the DD programme
160
ELECTIVE COURSES
Electives will be offered in three baskets. Students need to choose the electives from at least two baskets (no student will be allowed to choose all the electives from one basket). Faculty/Dept. consent has been received for all the electives.
Sl.No | Course No | Course Name | L | T | E | P | O | C |
|
| Basket 1 |
|
|
|
|
|
|
1 | AS5012 | Dynamics and control of rotorcraft | 3 | 0 | 0 | 0 | 6 | 9 |
2 | AS5040 | Flight Mechanics | 4 | 0 | 0 | 0 | 8 | 12 |
3 | AS 5010 | Aerodynamics and Aircraft Performance | 3 | 0 | 0 | 0 | 6 | 9 |
4 | AS5340 | Advanced flight mechanics | 3 | 0 | 0 | 0 | 6 | 9 |
5 | AM5010 | Biomechanics | 3 | 0 | 0 | 0 | 6 | 9 |
6 | AM5190 | Haptics in Biomedical Engg | 3 | 0 | 0 | 0 | 6 | 9 |
7 | AM5011 | Virtual Reality Engg. | 3 | 0 | 0 | 0 | 6 | 9 |
8 | ED5314 | Design, analysis and control of Robot Manipulators | 3 | 0 | 0 | 0 | 6 | 9 |
9 | OE 5011 | Marine Robotics | 3 | 0 | 0 | 0 | 6 | 9 |
10 | ME7010 | Microprocessor in automation | 3 | 0 | 0 | 0 | 6 | 9 |
11 | CE6011 | Smart buildings and automation | 3 | 0 | 0 | 0 | 6 | 9 |
12 | ED5040 | Human Anatomy Physiology and Biomechanics | 4 | 0 | 0 | 0 | 8 | 12 |
13 | ED5160 | Automotive systems | 4 | 0 | 0 | 0 | 88 | 12 |
14 | OE5310 | Guidance & Control of Marine Vehicles | 3 | 0 | 0 | 0 | 6 | 9 |
15 | ME6221 | Theory of Mechanisms | 3 | 0 | 0 | 0 | 6 | 9 |
16 | AS5570 | Principles of Guidance for Autonomous Vehicles | 3 | 0 | 0 | 0 | 6 | 9 |
17 | AS5545 | Dynamics and Control of Spacecraft |
|
|
|
|
|
|
|
| Basket 2 |
|
|
|
|
|
|
1 | CS5011/ EE5177 | Machine Learning for Computer Vision | 4 | 0 | 0 | 0 | 8 | 12 |
2 | CS6380 | Artificial intelligence | 4 | 0 | 0 | 0 | 8 | 12 |
3 | CS6700 | Reinforcement learning | 4 | 0 | 0 | 0 | 8 | 12 |
4 | CS7015 | Deep Learning | 4 | 0 | 0 | 0 | 8 | 12 |
5 | CS6350/ EE5175 | Computer Vision/ Image Signal Processing | 4 | 0 | 0 | 0 | 8 | 12 |
6 | CS6777 | Optimisation for computer vision applications | 4 | 0 | 0 | 0 | 8 | 12 |
7 | ID5030 | Machine Learning for Engineering and Science Applications | 3 | 1 | 0 | 0 | 6 | 10 |
8 | CS5691 | Pattern Recognition and Machine Learning |
|
|
|
|
|
|
9 | CS6910 | Fundamentals of Deep Learning |
|
|
|
|
|
|
|
| Basket 3 |
|
|
|
|
|
|
1 | EE5541 | Synthesis of control systems | 3 | 0 | 0 | 0 | 6 | 9 |
2 | EE6417 | Allied topics in control systems | 3 | 0 | 0 | 0 | 6 | 9 |
3 | EE6412 | Optimal Control | 4 | 0 | 0 | 0 | 8 | 12 |
4 | EE5340 | Micro-electro mechanical systems | 3 | 0 | 0 | 0 | 6 | 9 |
5 | EE5410 | Introduction to DSP | 4 | 0 | 0 | 0 | 8 | 12 |
6 | EE5177/ CS5011 | Machine Learning for Computer Vision | 4 | 0 | 0 | 0 | 8 | 12 |
7 | EE5175/ CS6350 | Image Signal Processing | 4 | 0 | 0 | 0 | 8 | 12 |
8 | EE6415 | Nonlinear Control Systems | 3 | 0 | 0 | 0 | 6 | 9 |
9 | ED5330 | Control of Automotive Systems |
|
|
|
|
|
|
Facilities
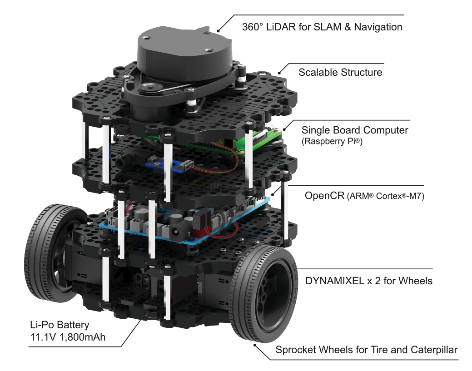
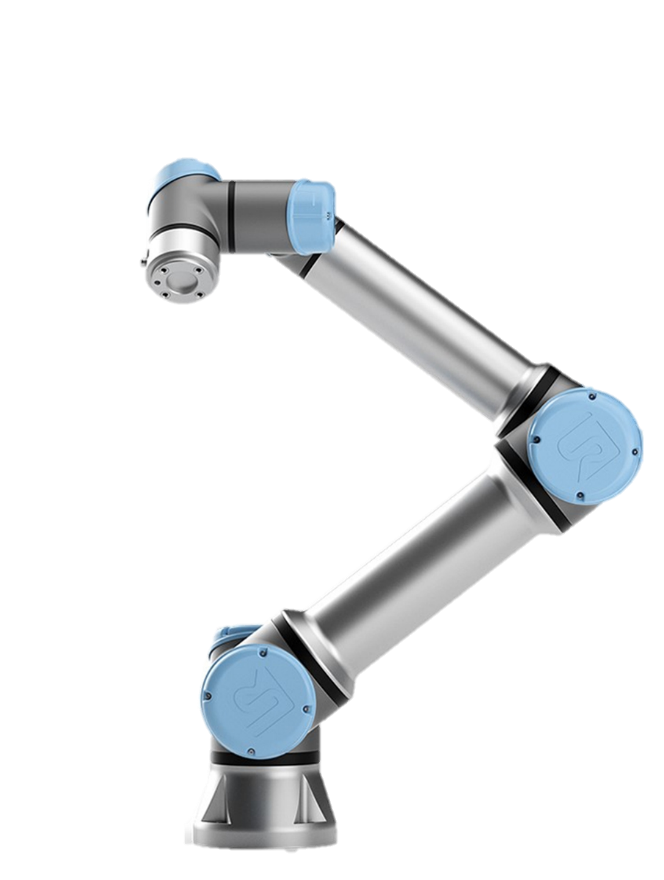
Collaborative Robots, Mobile Manipulators, Wheeled Mobile Robots, Haptic Systems, Industrial Robots, Modular Automation systems.






Coordinating Faculty

Asokan T (ED)

Krishna Vasudevan (EE)

Ravindran B (CS)
Contact Faculty