Project
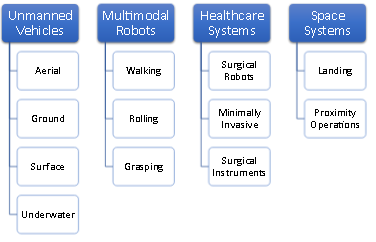
Autonomy: Applications
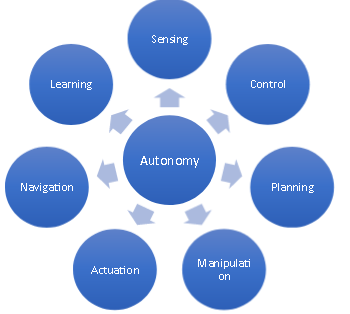
Technology Development for Autonomous Systems
- Design of event-triggered control laws for multi-agent robotic network
- Motion planning in uncertain / a-priori unknown environments
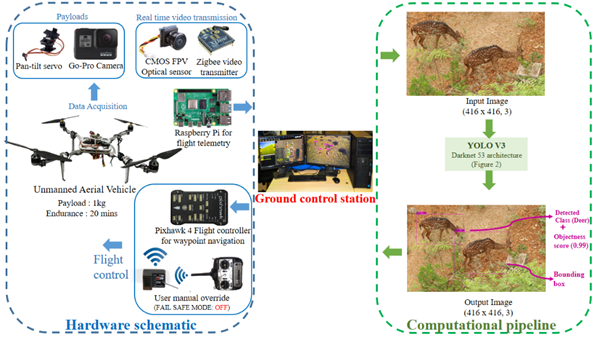
- Autonomy in homing / landing and close-range surveillance or monitoring
- Strategies for resilient attack or interdiction activity in an autonomous system
- Enhancement in space-systems autonomy in proximity and landing operations
- Kinematic and dynamic control of differential drive robot for waypoint tracking as well as to develop a control strategy for multi-robot obstacle avoidance
- Medical/healthcare technologies
- Optimal resolution of redundancy in collaborative manipulation of objects
Autonomous Systems Design
- Autonomous off-road vehicles
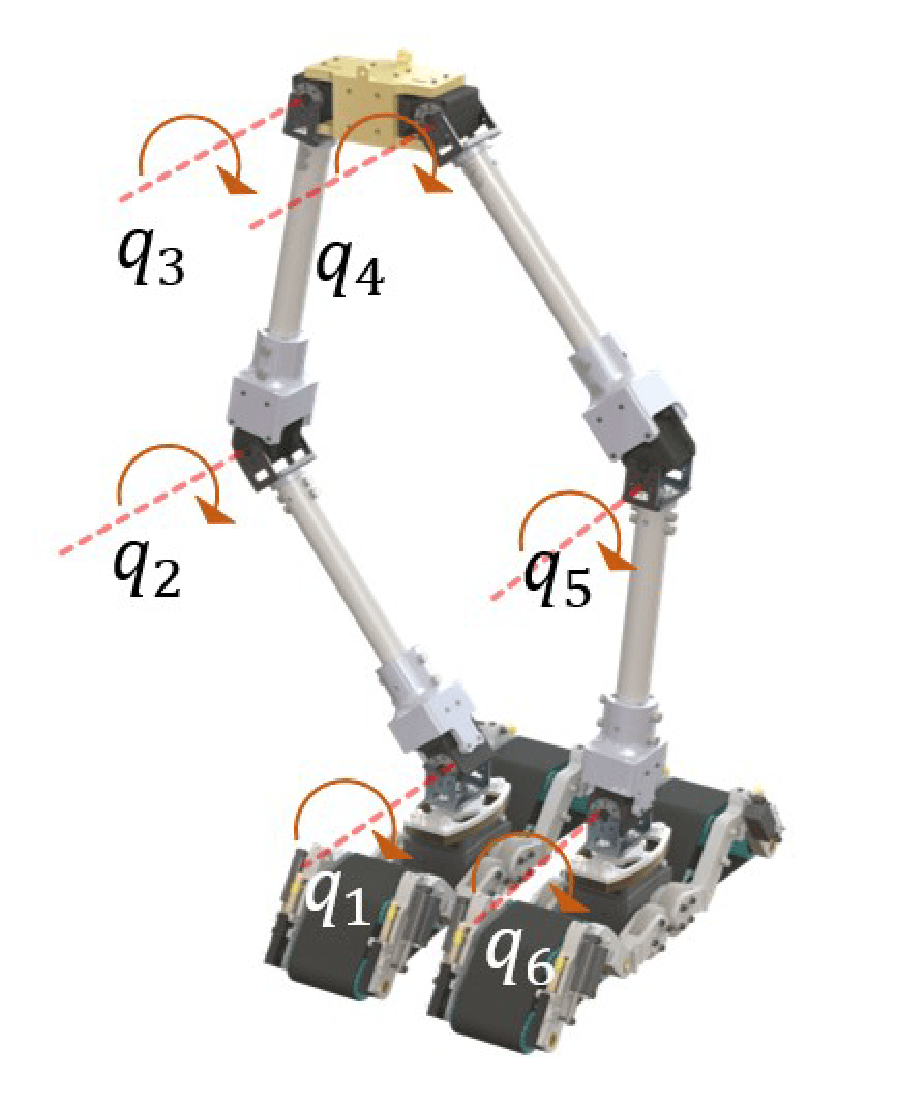
- Semi-autonomous mobile manipulator systems
- Robot assisted minimally invasive surgical system
- Differential drive robot for waypoint tracking as well as for multi-robot obstacle avoidance
- Multimedium and Multimodal robotic systems
Proposed Infrastructure and Devices
Mobile Manipulators

Mobile dual manipulator
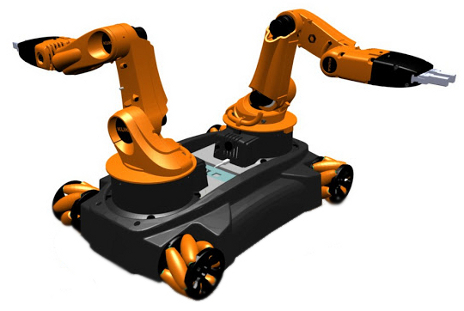
KUKA youBot
Existing/Proposed Infrastructure and Devices
Multipurpose Robots
Acutus - multimedium Robot
Multimodal robot
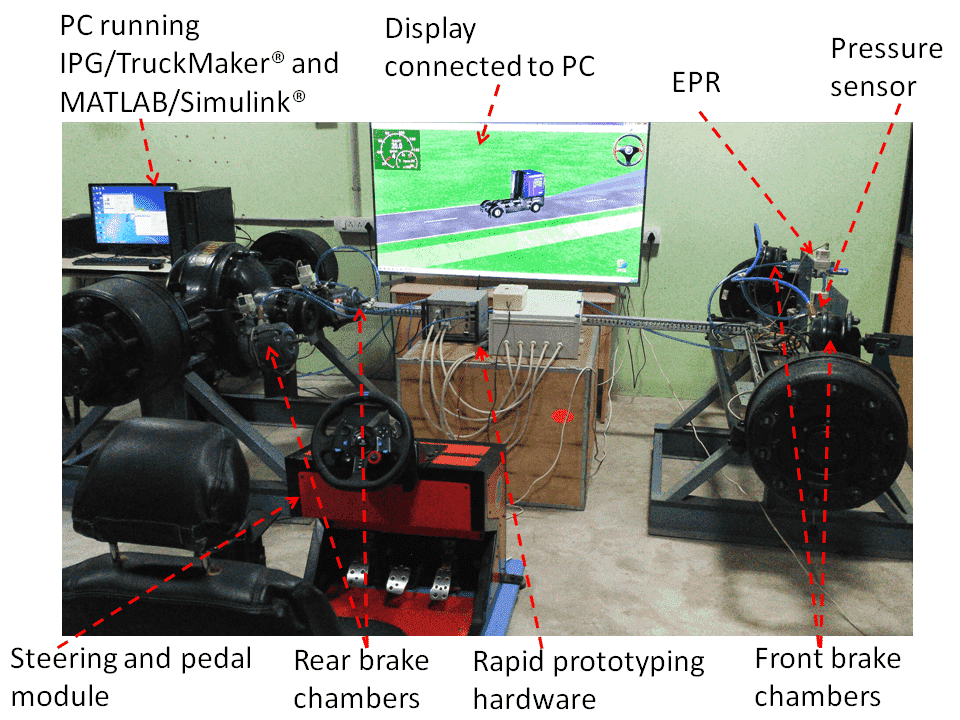
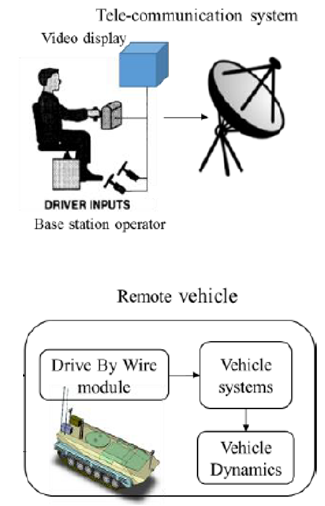
Semi-autonomous Vehicles
Motion capture
Healthcare Systems

Collaborations
Collaborators
- Prof. Eduardo Nebot, Australian Centre for Field Robotics (ACFR), University of Sydney, Sydney, Australia
- Prof. Michel Fisher University of Manchester, UK
- Prof. Davide Scaramuzza University of Zurich, Switzerland.
- Prof. Dikai Liu, UTS, Australia
- Prof. Gammini Dissanayake. UTS, Australia
- Prof Darwin G. Caldwell, Istituto Italiano di Tecnologia (IIT), Italy
- Dr. Nikhil Deshpande, Istituto Italiano di Tecnologia (IIT), Italy
- Prof. Umesh Vaidya, Clemson University, USA
- Prof. Rajesh Rajamani, University of Minnesota, USA
- Dr. Iulian Iordachita , Johns Hopkins University, USA
- Prof. Ben M Chen Chinese University of Hong Kong
- Prof. Oleg Yakimenko Naval ,Postgraduate School, Monterey CA, USA
- Prof. Tal Shima Technion, Israel
- Prof. Sivakumar Rathinam, Texas A&M University, USA
- Prof. Animesh Chakravarthy, University of Texas at Arlington, USA
- Prof. Dinesh Manocha, University of Maryland at College Park, USA
- Prof. Rajnikant Sharma ,University of Cincinnati, USA
- Dr. David Casbeer, Air Force Research Laboratory, USA
- Prof. Kamesh Subbarao, University of Texas at Arlington, USA
- Prof. Antonios Tsourdos, Cranfield University, UK
- Prof. Mehmet Ismet Can Dede, Izmir Institute of Technology
Technical/ Scientific Progress
New work done in the project
Mathematical Modelling of tracked vehicles for autonomous operation is under progress. Design and Development of multimedium robotic vehicle for land, water, and aerial applications in progress.
Infrastructure developments
Output
Journal Paper:
- Design, analysis, and testing of a hybrid VTOL tilt-rotor UAV for increased endurance. Sensors, (Open access Journal by MDPI, IF: 3.576). Conference Presentation:
- Deep Learning based real-time biodiversity analysis using autonomous aerial vehicles, 9th Int. Conference on Robot Intelligence Technology and Applications, Dec. 9-12, South Korea
- Multi-robot Decentralized Exploration using Weighted Random Selection, In Proceedings of the 18th International Conference on Informatics in Control, Automation and Robotics - ICINCO, 523-529, 2021